Modellbezeichnung: ECU-2101
Übersicht



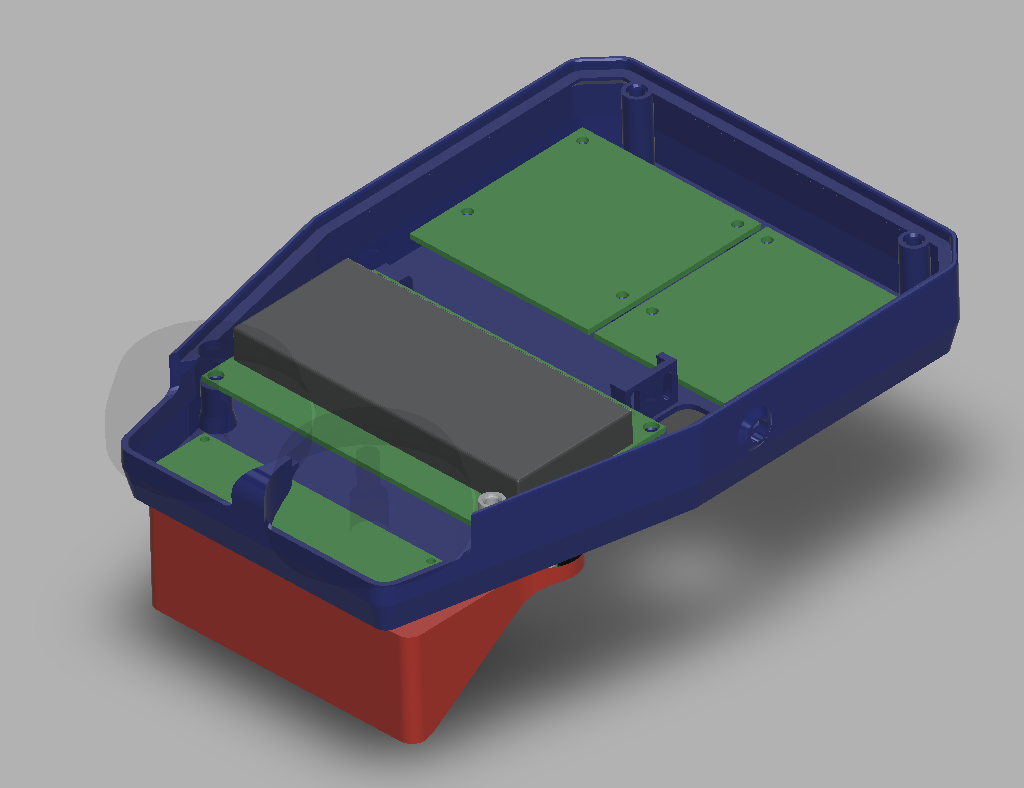
3D Design mit Autodesk Fusion 360



Elektronik
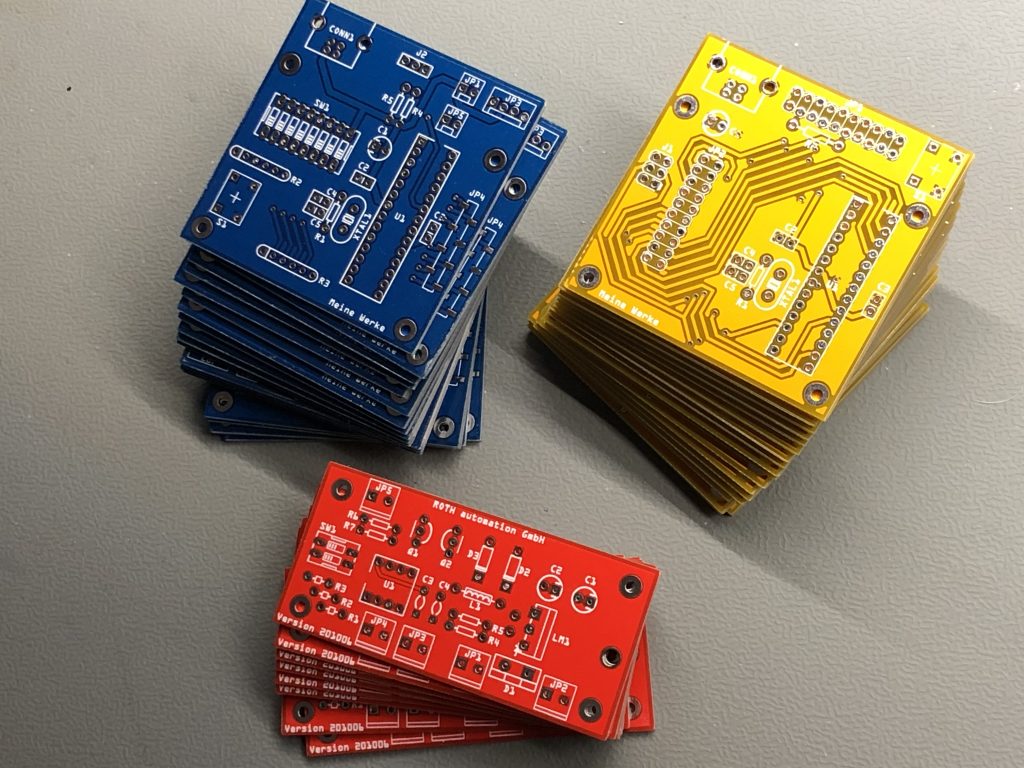
PCBs
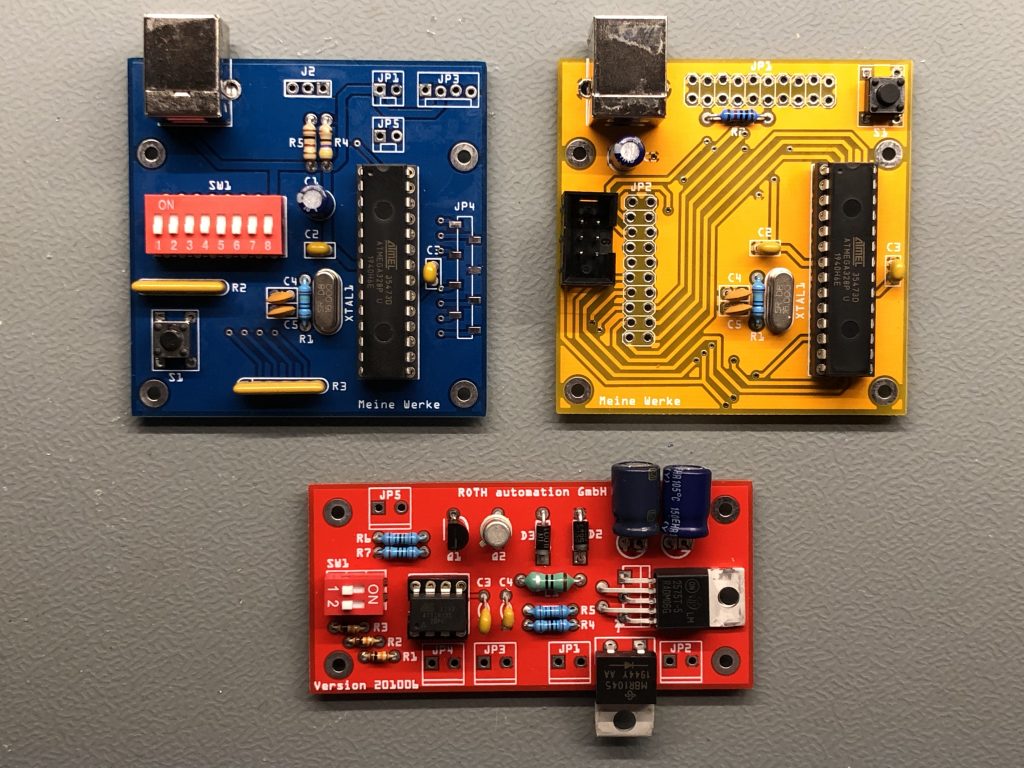

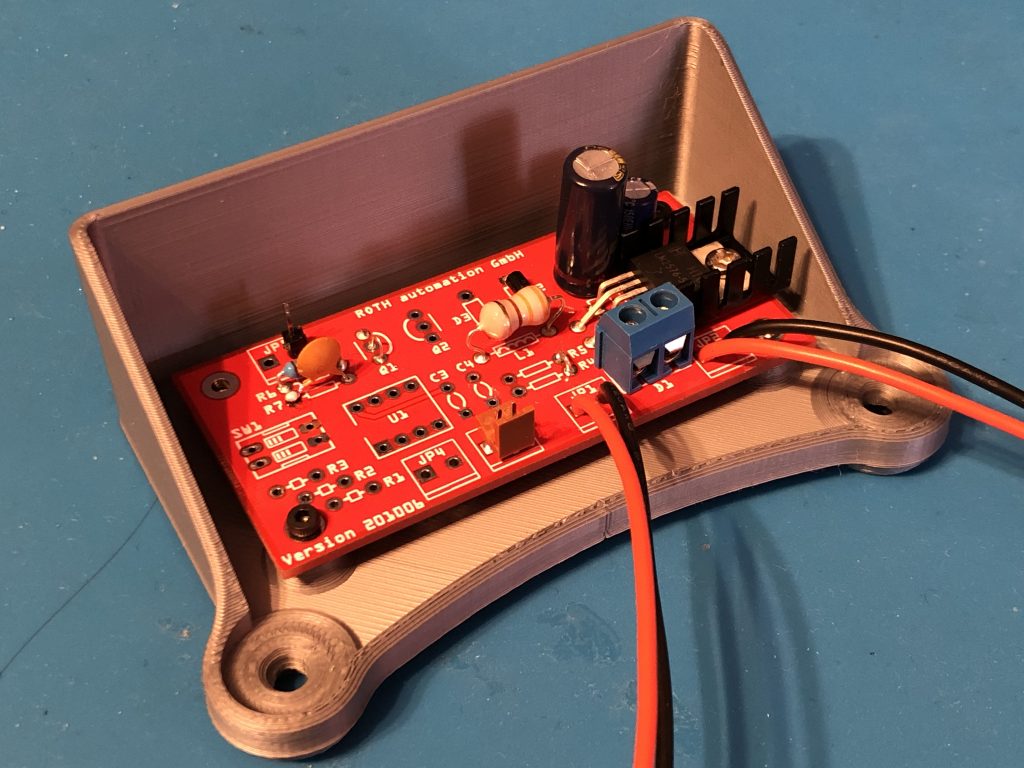
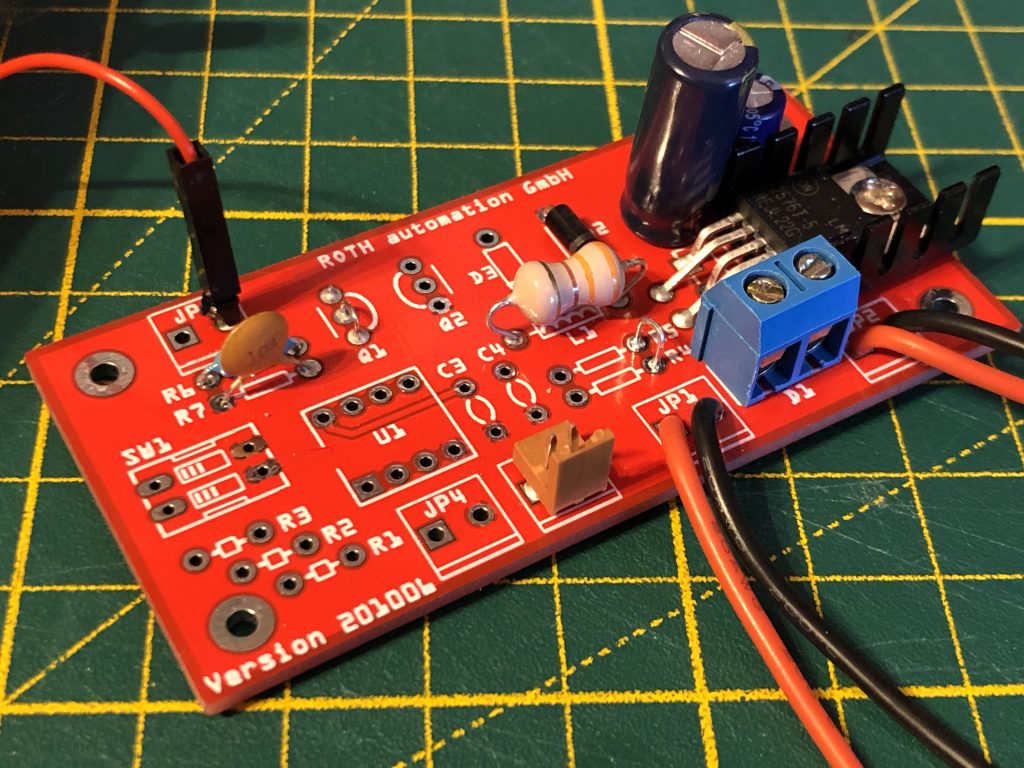
Stromregler
Stromgregler wurde mit LM2576 IC realisiert. Diese IC ist für Batteriebetrieb gut geeignet da es bei Stromumwandlung wenige Energieverluste gibt.
Mit dem Induktion/Diode Kreis wird der Strom gut stabilisiert damit beim Betätigen von Servo keine Spannungssprünge gibt, welche Funktion von Microcontrollern stören könnten.
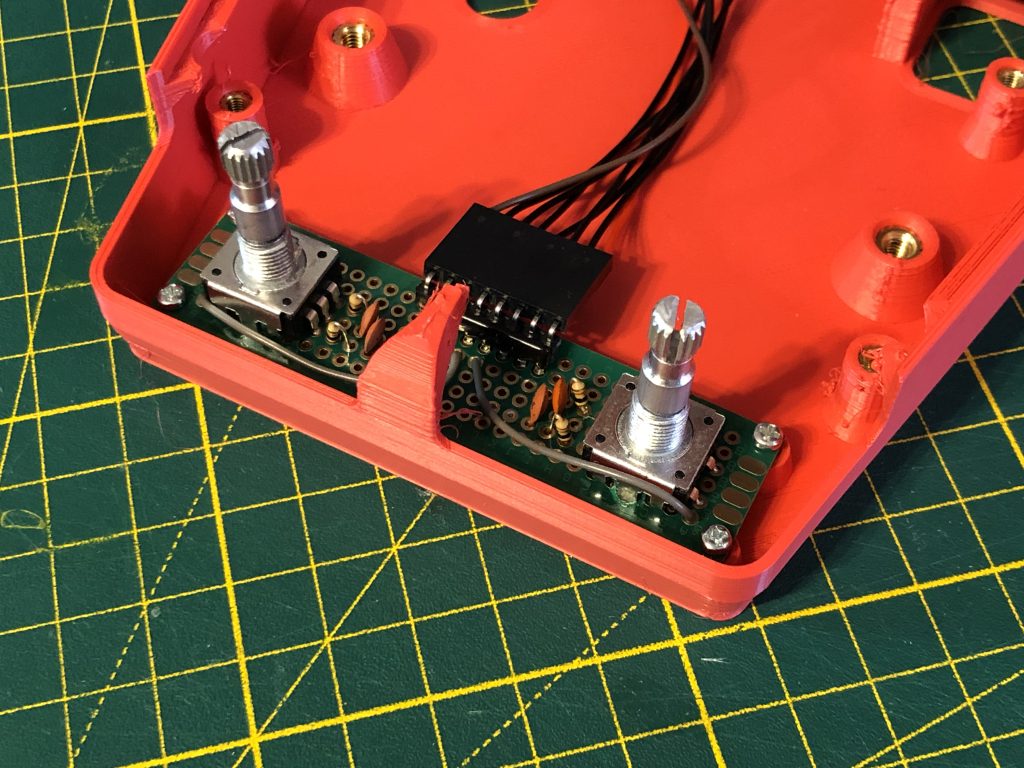
Drehregler
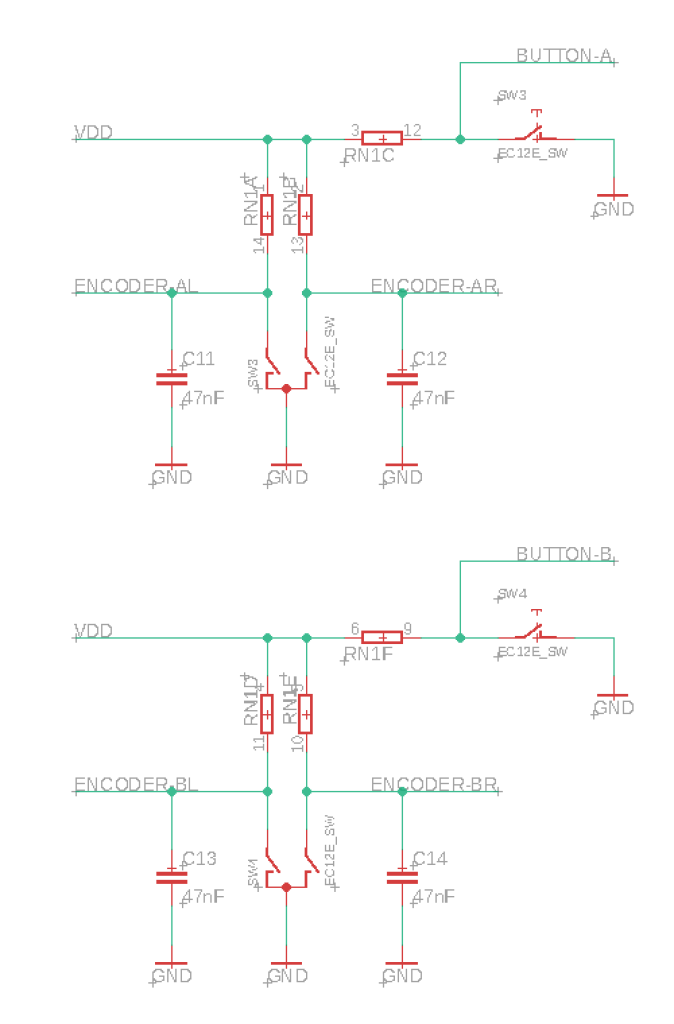
Schaltplan
Drehregler werden auf einer separaten PCB aufgebaut. Pull-Up Widerstände und Stabilisierungs-Kondensatoren müssen auf derselben Platine möglichst nah zu den Encoders aufgebaut um Signalqualität zu gewährleisten.
| 1 | GND |
| 2 | Encoder A Drehrichtung links |
| 3 | Encoder A Drehrichtung rechts |
| 4 | Druckknopf A |
| 5 | Druckknopf B |
| 6 | Encoder B Drehrichtung links |
| 7 | Encoder B Drehrichtung rechts |
| 8 | VCC (5,0 Volt vom ECU) |
Aufbau
Es werden PEC11R-4225K-S0024 verwendet. Diese Drehregler zeichnen sich mit 24 Schaltpunkten pro Umdrehung und eine Druckknopf-Funktiuon.
Anmerkung: In dem Gerät mit Seriennummer 210320 werden, wegen langen Lieferzeit von Mouase, die Encoder von Typ PEC11R-4230K-S0024 verbaut, deren Schaft ist 5mm länger als bei 4225K Modell. Die Schaften werden um 5mm gekürzt damit auf allen Geräten die gleichen Drehknobs später eingesetzt werden können.

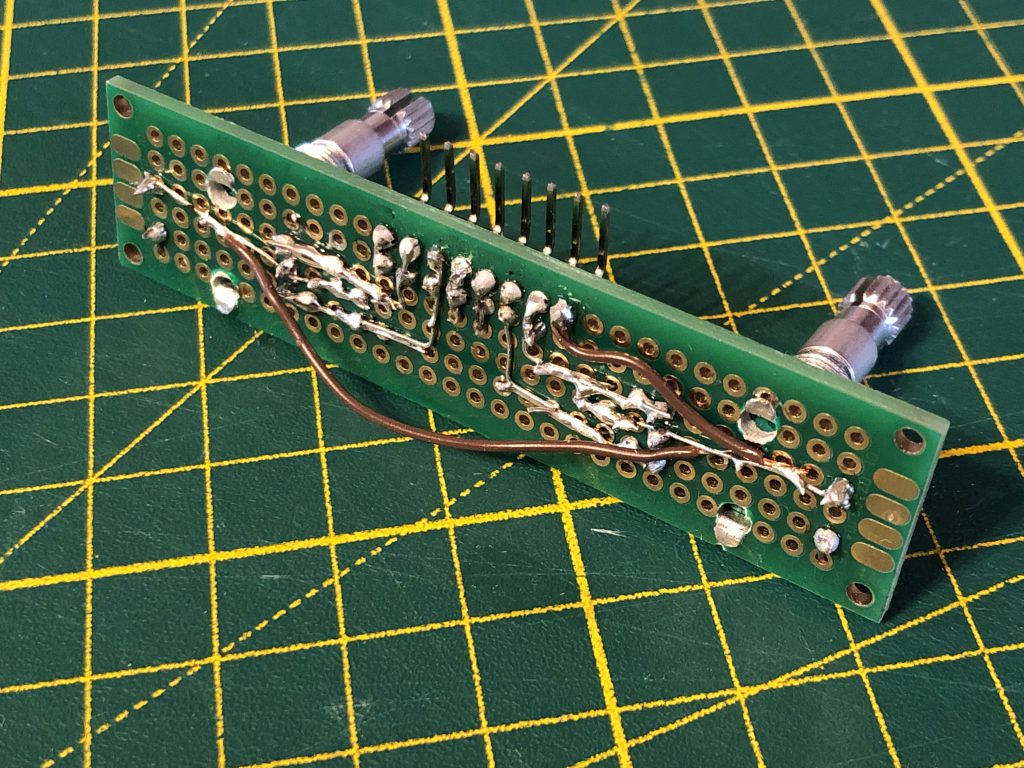
Einbau
PCB mit den Reglern wird im ECU Gehäuse mit 4x M2 5mm Schrauben befestigt.
Anschlusskabel wird mit GND links und VCC rechts eingesteckt.
Ball-Erkennung-Sensor

Allgemein
Für den Ball-Erkennung-Sensor wurde es für den Sensor QRE1117 entschieden. Diese Sensor beinhalten den Signalsender und Empfänger in einem Gehäuse und benötigt keine separate Signallquelle. Das spart Platz und vereinfakt elektronische Aufbau.

Einbauort
Sensor wird auf einer Sensor-Adapter-Platine aufgebaut und wird in Rohrwand direkt vor dem Ball-Auslöser eingebaut.


Präzision
Signal vom Sensor wird in Microcontroller auf 80% Pegel eingestellt. Damit wird der Ball (oder andere Gegenstand) bereits in ca. 7mm Entfernung erkannt.
Distanz zum Gegenstand ist konstant unabhängig von Verschmutzung des Gegenstands und der Lichtstärke.

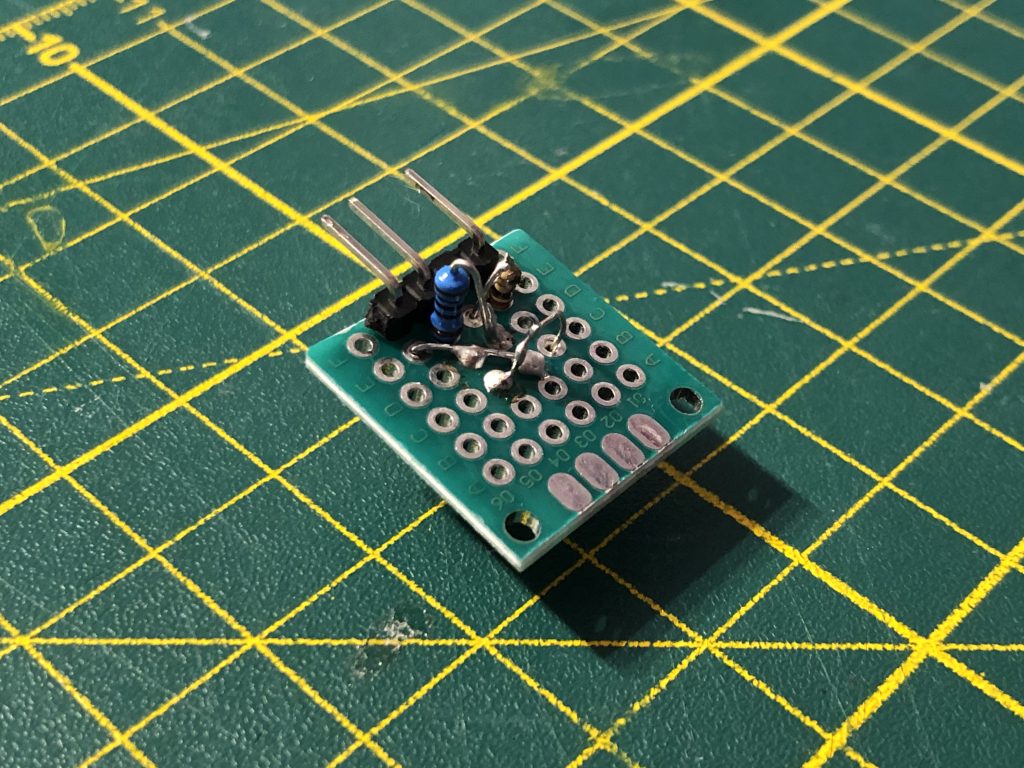
Aufbau
Widerstände werden auf Sensor-Adapter-Platine direkt aufgebaut.
Sensor wird so gelötet, dass er auf gesamte Länge der Beinchen „steht“ um möglichst nah zu dem Ball zu sein.

Anschlüße
Hauptschalter
Zwei rote Leitungen mit Aderenhülsen werden in das blaue Klemmenhalter am Stromregler angeschlossen. Hier gibt es keine Polarität.

ECU Stromversorgung
Rot/schwarze Leitung mit braunem Stecker wird am Stromregler eingesteckt. Für richtige Polarität sind Stecker und Steckbüchse mit einseitigem Raster versehen.
Damit wird ECU und entsprechend auch Servo mit 5 Volt Spannung versorgt.
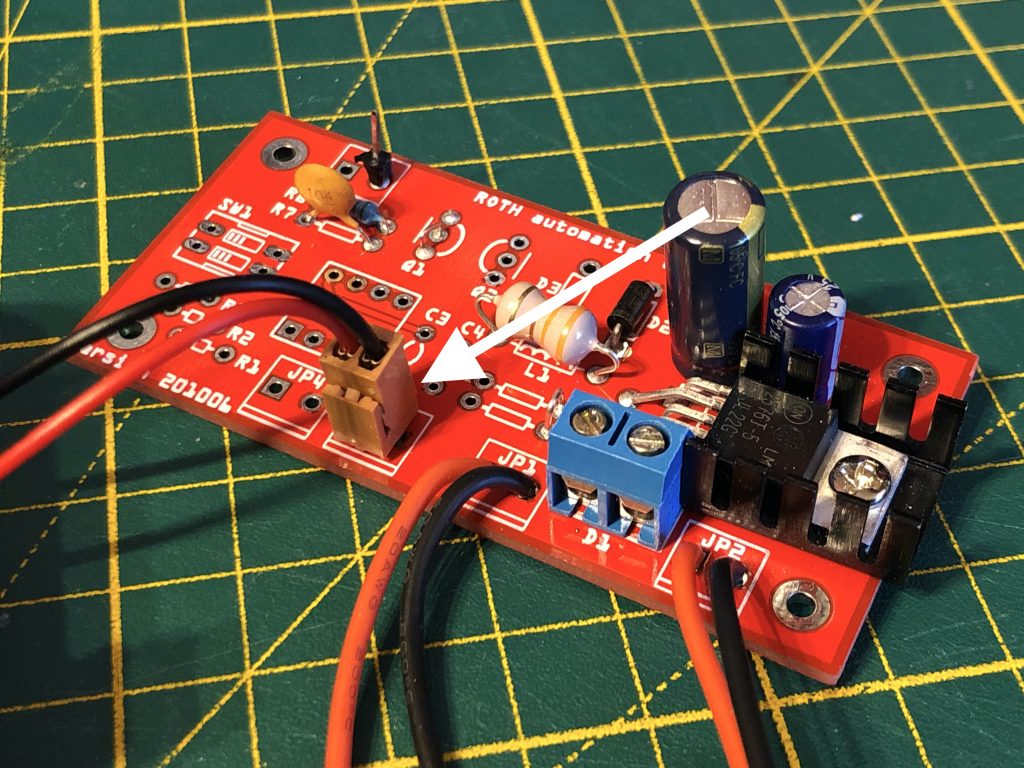
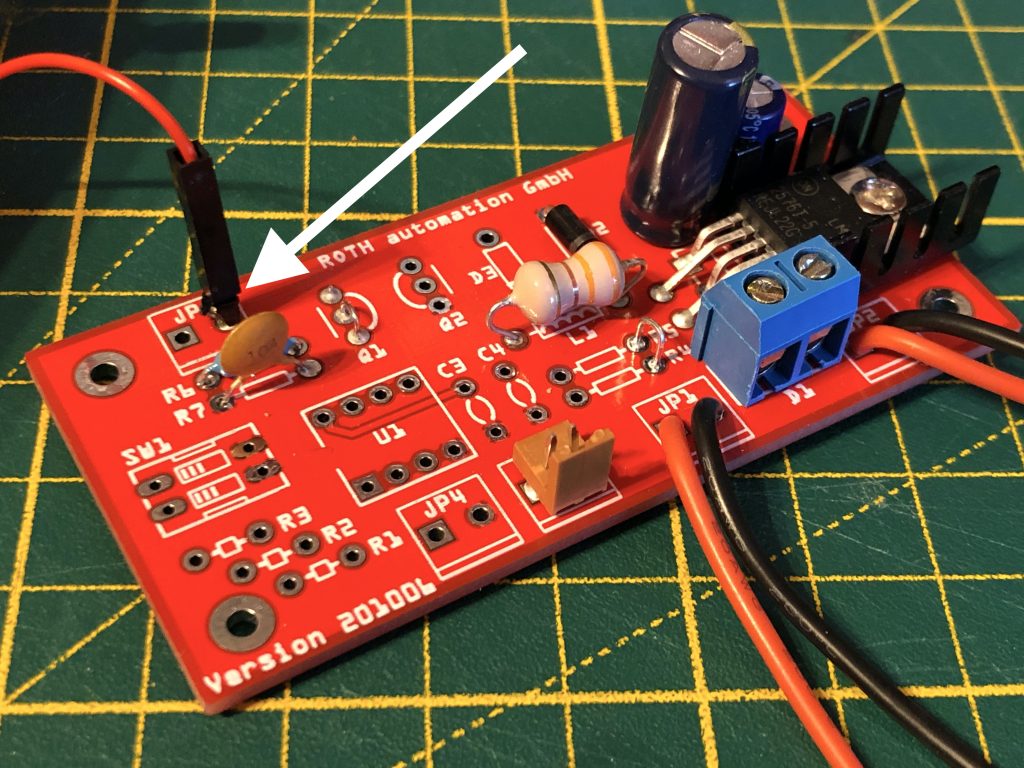
Batteriestand Messung
Einzelne rote Leitung wird am Stromregler auf einen aleinstehenden Pinstecker angeschlossen.
Über diese Leitung wird Sense Signal vom Stromregler durch ECU gelesen um Batteriespannung zu messen.
ESC
Zu ESC geht eine blaue Leitung. Falls ESC Stecker über mehrere Kabeln ferfügt, muss die Leitung von ESC an gelbe, orangene oder weiße Leitung des ESC Steckers angeschlossen werden.

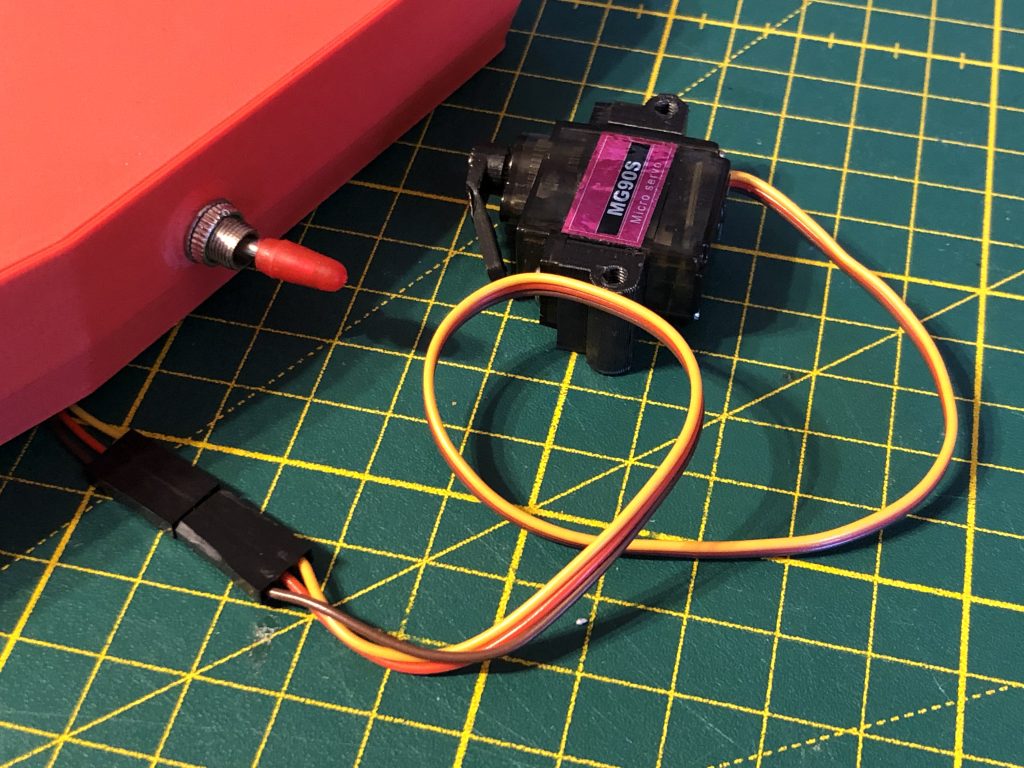
Ball-Auslöser Servo
Stecker zum Anschluss an Servo hat 3 Leitungen mit standarten PWM Farbkennungen:
- schwarz oder braun → Masse
- rot → Stromversorgung
- gelb, orange oder weiß → Signal
Ball-Auslöser Ball-Erkennung-Sensor
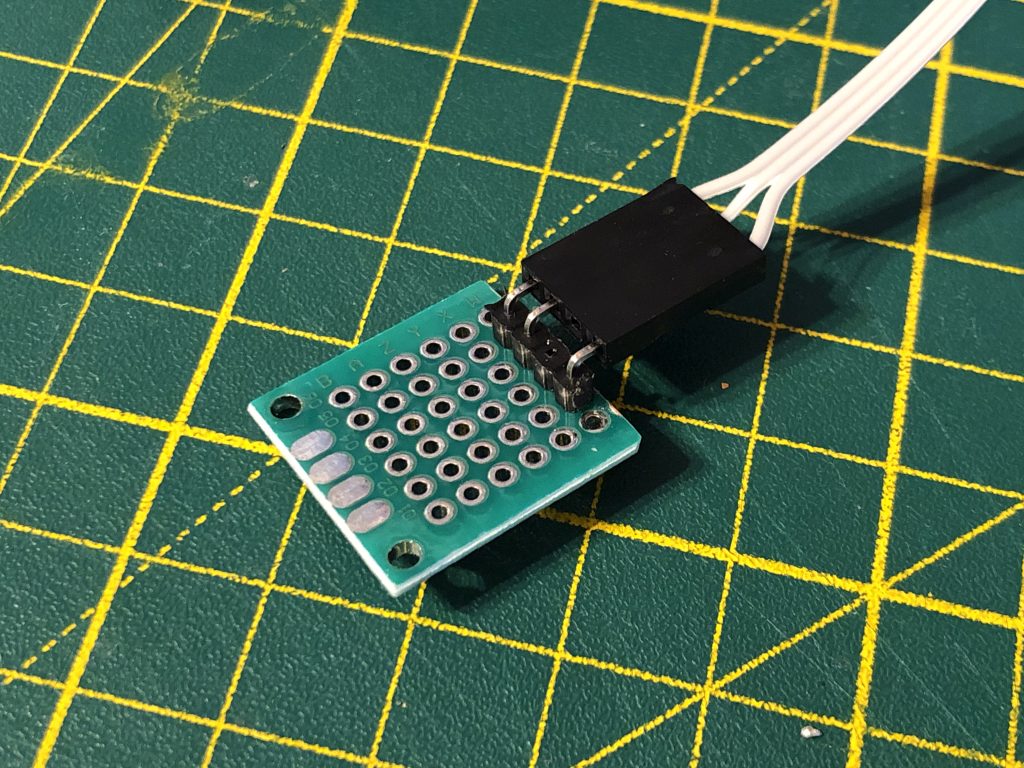
4-Pin Stecker wird an den Ball-Erkennung-Sensor angeschlossen. Zu Polarität dient ein fehlendes Pin an Steckanschluss sowie ein nicht belegte Pin in der Steckbüchse.
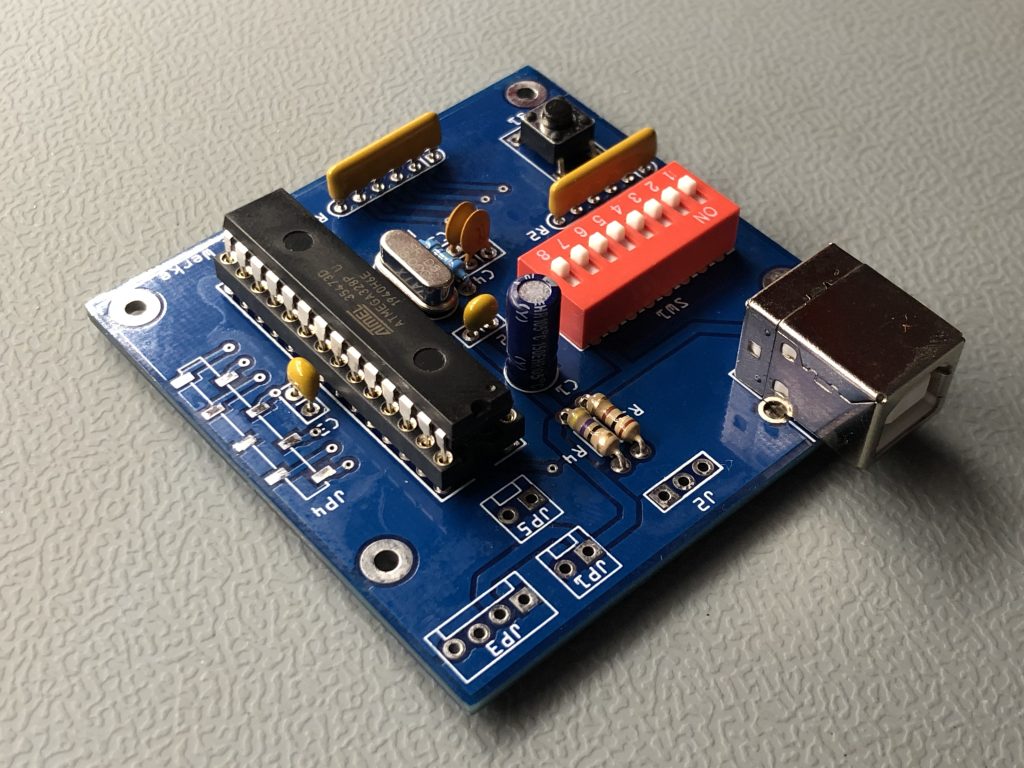
P.S.: Sensoren wurden bisher noch nicht geliefert, daher auf dem Bild wurde eine nackte Platine dargestellt. Diese zeigt aber den Stecker.




0 Kommentare